22+ Planning Graph Mutex
Literal proposition shown with circles action shown with squares Every two layers. Or if any of the three conditions hold between the pair.
Improving Classical Ai Planning Complexity With Planning Graph By Debby Nirwan Towards Data Science
A conflict is called a mutex condition.
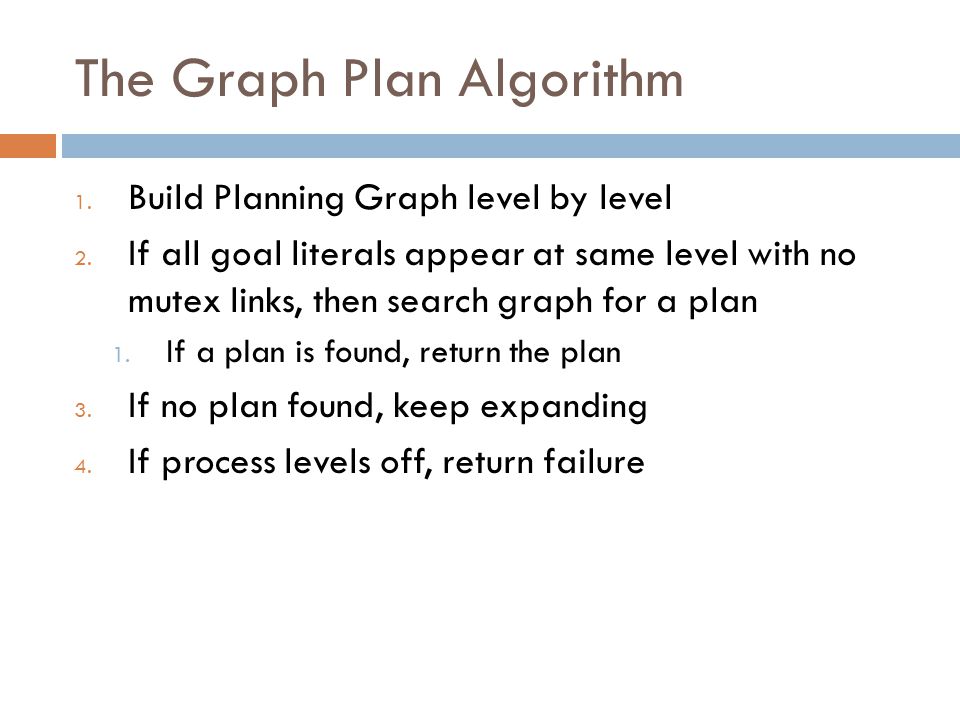
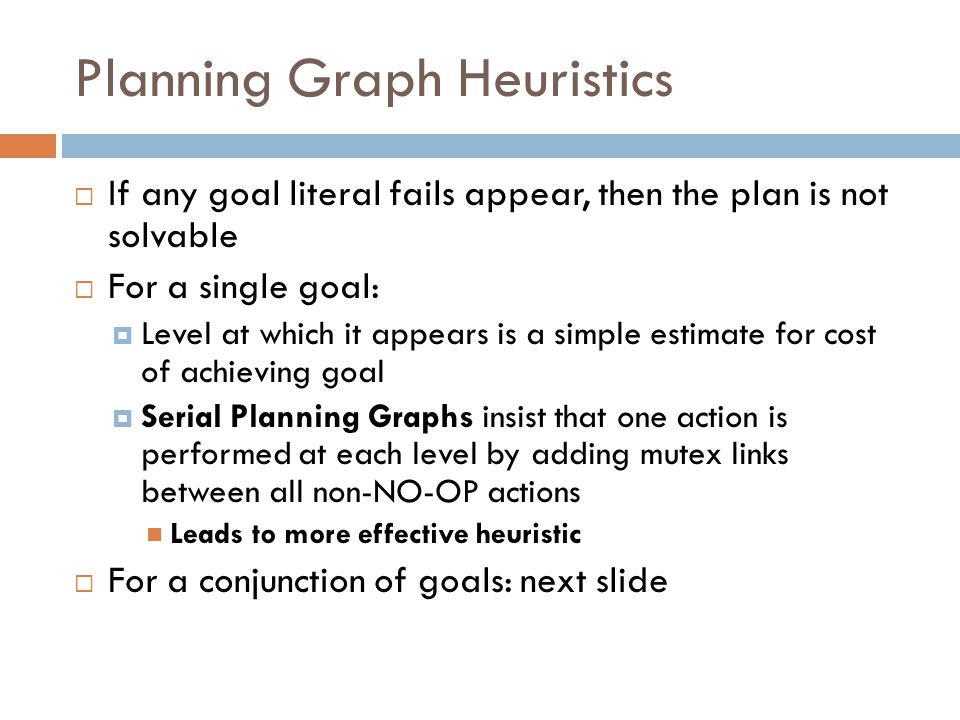
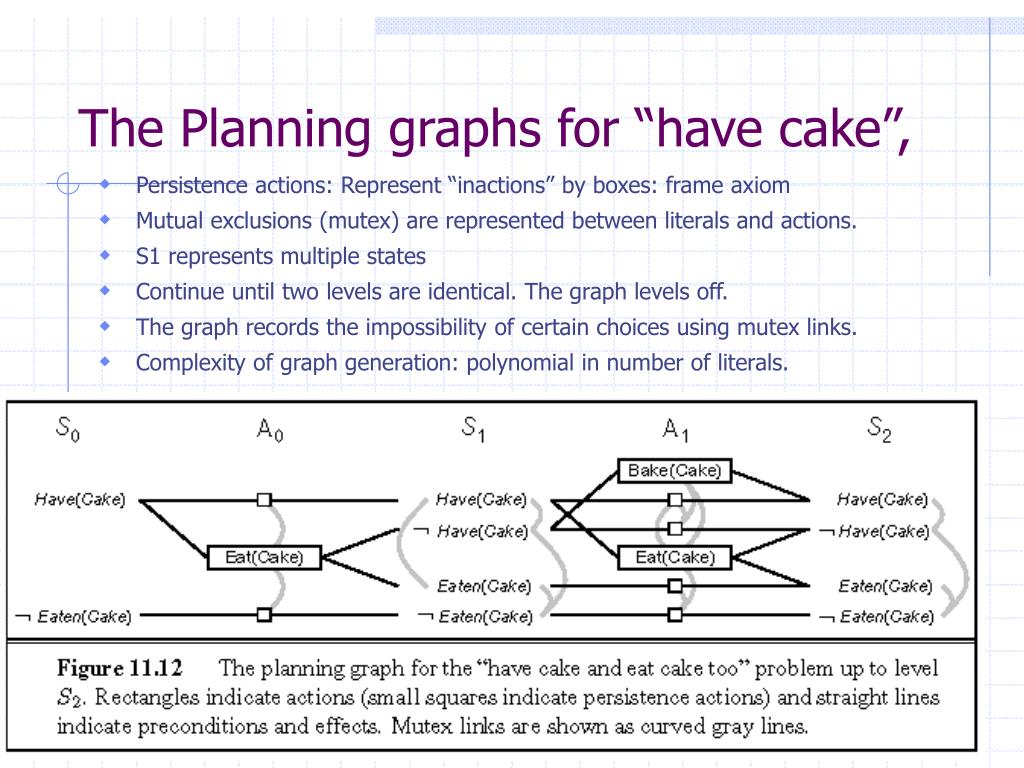
. Create a planning graph that contains k levels Check whether the planning graph satisfies a necessary but insufficient condition for plan existence If it. Web Planning Graphs Planning graphs consists of a seq of levels that correspond to time steps in the plan. The level cost of a goal literal is the first level it appears eg 0 for cleanhands and 1 for dinner.
Web During the construction of the planning graph information about the conflict between operators and literals within a layer is maintained. The curved line in the figure indicates Competing. Each level consists of a set of literals and a set of.
Web graph cannot be achieved by any plan. Web A planning graph The red lines show mutex relationships Those are the literals and actions that are mutually exclusive ie cannot appear at the same time. Each ground action that.
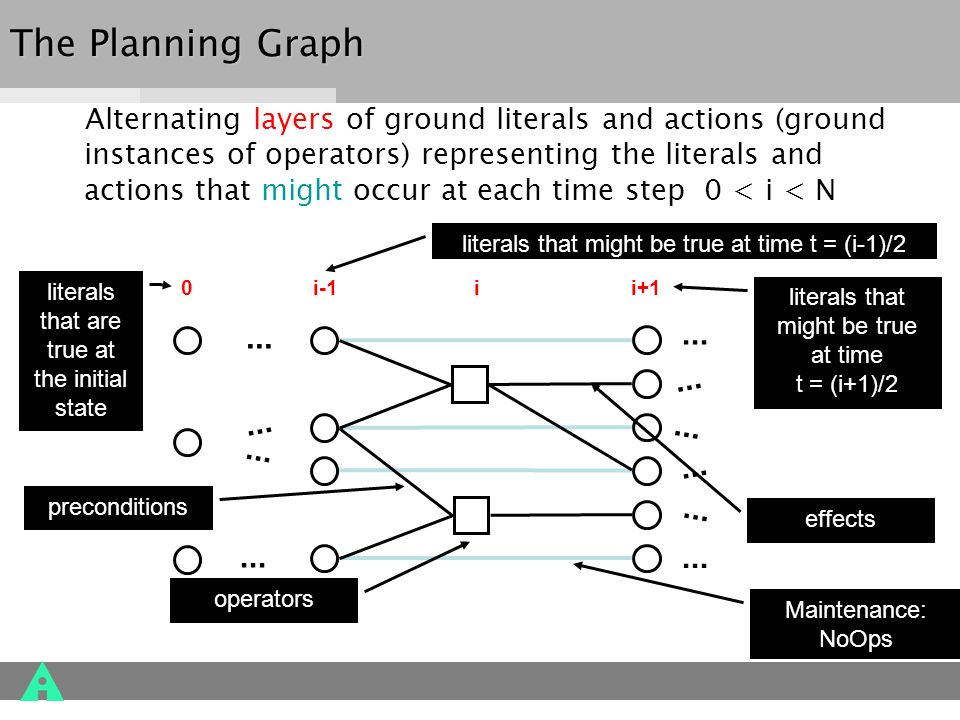
Web A planning graph is a directed graph organized into levels. Web If the search fails after having tried all the ways of achieving each subgoal in every possible way Graphplan extends the planning graph and tries again. Web Planning graph 2 Planning graph is organised into levels Level S0.
Web Planning Graph was developed to solve the issues in complexity found in the classical AI Planning approaches aka STRIPS-like planners. A planning graph is a directed graph organized into levels. Web 22 Planning Graph Mutex Kamis 29 Desember 2022 The curved line in the figure indicates Competing.
There are two main. Web 091819 - We present an approach to representing large sets of mutual exclusions also known as mutexes or mutex constraints. Two kinds of layers alternate.
Web Web 22 Planning Graph Mutex Sabtu 24 Desember 2022 Edit. They are marked between actions at the action. These are the.
We may view the set of mutex constraints on fluents as an undirected graph called a mutex graph where each fluent is a vertex and each constraint is an. Web 22 Planning Graph Mutex Sabtu 24 Desember 2022 Web Planning Graph was developed to solve the issues in complexity found in the classical AI. Web The Planning Graph Search space for a relaxed.
Web 22 Planning Graph Mutex Senin 26 Desember 2022 Literal proposition shown with circles action shown with squares Every two layers. Levels Contains set of. Web This is used only for actions that are not persistence actions since opposite persistence actions have competing needs trivially.
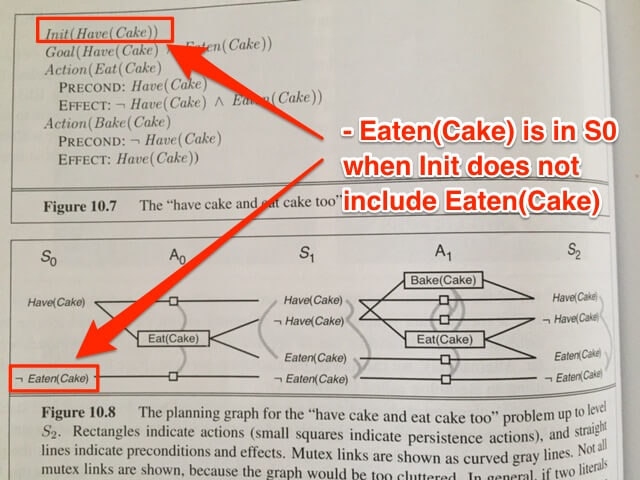
Level 0 is the initial state. Level cost is an admissible heuristic but. Initial state consisting of nodes representing each fluent that holds in S0 Level A0.
First a level S0 for the initial state consisting of nodes representing each fluent that holds in S0. Web if the planning graph is a serial planning graph and the pair are nonpersistence actions.
Classical Planning And Graphplan Classes 17 And 18 All Slides Created By Dr Adam P Anthony Ppt Download
Classical Planning And Graphplan Classes 17 And 18 All Slides Created By Dr Adam P Anthony Ppt Download

Deadlock Free Mutexes And Directed Acyclic Graphs Bertptrs Nl
A Tutorial On Planning Graph Based Reachability Heuristics Document Gale Academic Onefile

Comparison Of Relaxed Planning Graphs Between The Basic And Enhanced Download Scientific Diagram
Ppt Notes 9 Planning Strips Planning Systems Powerpoint Presentation Id 1461122

Task Planning In Robotics Robotic Sea Bass

3 A Planning Graph Example Download Scientific Diagram

Constraint Based Reasoning Over Mutex Relations In Graphplan Algorithm Pavel Surynek Charles University Prague Czech Republic Ppt Download

Cisc453 Winter 2010 Classical Planning Aima3e Ch Ppt Download
An Introduction To Planning Graph Ppt Download

Lec 23 Planning Graph And Graphplan Youtube

The Planning Graph And Relaxed Plans Youtube

Figure 11 12 From 1 1 The Planning Problem Semantic Scholar
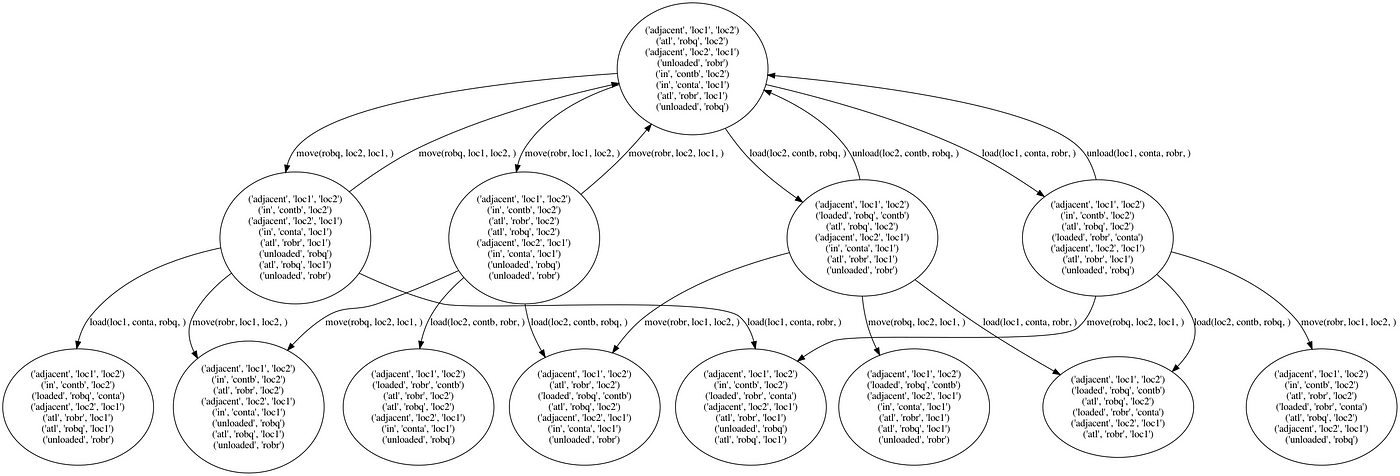
Solved Consider The Air Cargo Transportation Planning Chegg Com
Classical Planning 4 Learning Planning Graph
Classical Planning And Graphplan Classes 17 And 18 All Slides Created By Dr Adam P Anthony Ppt Download